{kind=link}
What is Uncanny valley
The Uncanny Valley is a term used in describing the emotional response on humans when they come in contact with humanoid robots or other artificial entities that are almost but not quite human-like in appearance and behavior. This word was first coined and described by a Japanese roboticist, Mashiro Mori in an article published in the year 1970. He used the words “bukimi no tani gensho” meaning “Valley of eeriness“. Jasia Reichardt, an author in the year 1978 translated it to “Uncanny valley” in a book ROBOTS: FACT, FICTION AND PREDICTION.
Mori used this after noticing that people appreciated and loved his robots the more human they looked. This worked up to a certain point where people began to feel disturbed, uneasy and sometimes afraid of them, so he came up with a theory that “in climbing toward the goal of making robots appear human, our affinity for them increases until we come to a valley, which I call the uncanny valley” .
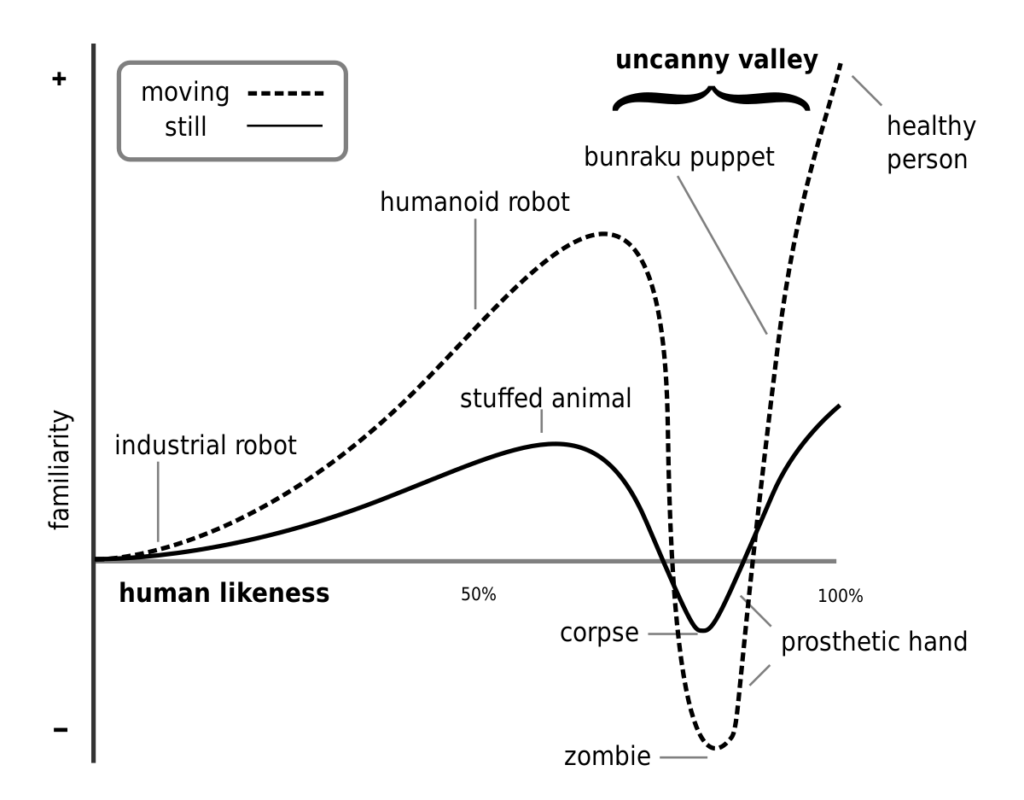
The term “uncanny” refers to something that is strange or mysterious in a way that is unsettling or eerie. The “valley” refers to the dip in the graph that represents people’s emotional response to a robot or character as it becomes more human-like, therefore “Uncanny valley” refers to the feeling of unease, disturbance, revulsion, eeriness and even sometimes fear that humans feel when they come in contact with humanoid or human like robots or artificial entity which are highly lifelike.
Impact or effects of Uncanny valley on human – robot interaction
One of the main goals of humanoid robots or other artificial entities like androids, avatars and animations is to make them as close to human resemblance as possible, but with the advent of the Uncanny Valley, this purpose is pretty much defeated.
When a robot looks and behaves almost like humans, we tend to expect it to behave like a human in every way and when this expectation is cut short, it creates this feeling of eeriness or even repulsion. This actually makes it difficult for people to accept the use of robots and other AI powered devices in their daily lives, this in turn has implications for the future of automation and robotics.
Here are some specific impacts of the Uncanny Valley on Human – Robot Interaction:
- Reduced Trust: When people encounter robots that fall into the Uncanny Valley, they may become less trusting of them. This can make it difficult for the robot to effectively assist or work alongside humans, especially in situations where trust is essential, such as healthcare or military applications.
- Decreased Likability: If a robot is unsettling or off-putting, people may be less likely to want to interact with it or use it, even if it’s designed to provide helpful services.
- Negative Emotional Responses: Humans may experience negative emotions, such as discomfort or fear, when interacting with robots in the Uncanny Valley. These emotions can create barriers to effective communication and interaction.
- Ineffective Communication: If a robot’s appearance and behavior are too different from what people expect from a human, it may be difficult for people to understand its intentions or communicate with it effectively.
With the effects of the Uncanny Valley, it’s safe to say and easy to say that it can be a very strong an obstacle in the advancement of HRI(human – robot interaction) as the aim of modern robotics is to make robots look and act more human and this in turn triggers the Uncanny Valley.
In other to avoid this phenomenon and come to a somewhat middle point between robotics advancement and the Uncanny Valley, there are ways to avoid the Uncanny Valley from settling in robotics.
Ways in which the Uncanny Valley can be overcomed.
Overcoming the Uncanny Valley is a complex issue that involves several factors. Here are some strategies that may help:
- Improve the visual appearance: One way to overcome the Uncanny Valley is to improve the visual appearance of the artificial entity. This can be achieved by using more realistic textures, adding details such as hair, wrinkles, and imperfections, and fine-tuning the lighting and shading to make the entity look more natural.
- Enhance the motion and behavior: The motion and behavior of the artificial entity can also play a crucial role in overcoming the Uncanny Valley. It is essential to make the movements more fluid and natural-looking, which requires advanced motion-capture technology and skilled animators. Additionally, adding more human-like behavior, such as facial expressions, gestures, and eye movements, can help bridge the gap between the artificial entity and a human being.
- Context and purpose: The context in which the artificial entity is used can also affect how it is perceived by viewers. If the purpose of the entity is clear and the context is appropriate, the viewer may be more willing to accept it. For example, a humanoid robot designed to assist in caregiving tasks may be more acceptable than one designed for military applications.
- Gradual exposure: Gradual exposure to the artificial entity can also help overcome the Uncanny Valley. Start by introducing the entity in small doses and gradually increasing the exposure over time. This allows the viewer to become more familiar with the entity and more accepting of its presence.
- Education: Educating the public about the technology and design choices behind the artificial entity can also help overcome the Uncanny Valley. When people understand how the entity was created and why certain design choices were made, they may be more accepting of its appearance and behavior.
Examples of the Uncanny Valley in action.
Ameca(a humanoid robot)
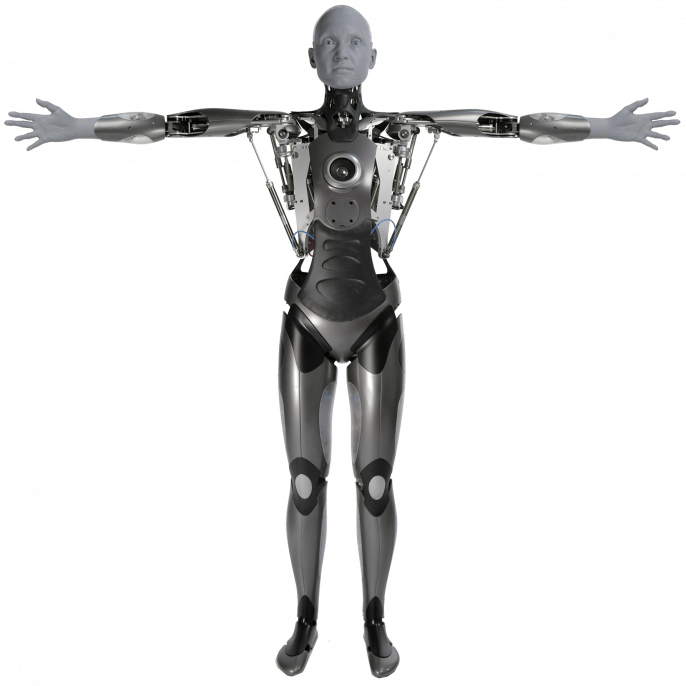
Engineered Arts’ Ameca is a humanoid robot with a silicon face and sensors that can follow the motion of an object or person. It interacts with the public via embedded microphones, binocular eye mounted cameras, a chest camera, and facial recognition software. GPT-3 or human telepresence can both control interactions. Additionally, Ameca has motorized, articulated arms, fingers, a neck, and facial features.
The face and hands of Ameca have grey rubber skin that was purposefully created to look genderless. It can distinguish faces and voices, and it has the ability to convey amazement and surprise. Ameca can recognize emotions and even age, in addition to yawning and shrugging. If you’re being too loud, it can also quiet you down.
CB2
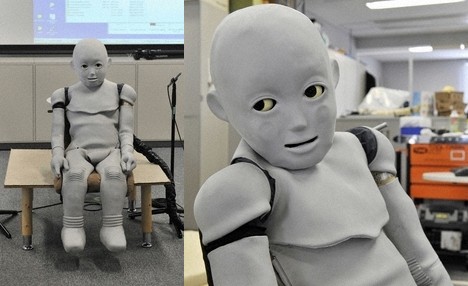
A 2-year-old child’s physical and mental abilities are mimicked by the humanoid CB2.Researchers have employed CB2, a young robot created by the University of Osaka, to investigate the learning and cognition of robots. CB2 was gray and hairless, with sensors embedded in its skin that resembled a futuristic space suit, and its eyes were fitted with cameras.
Telenoid R1
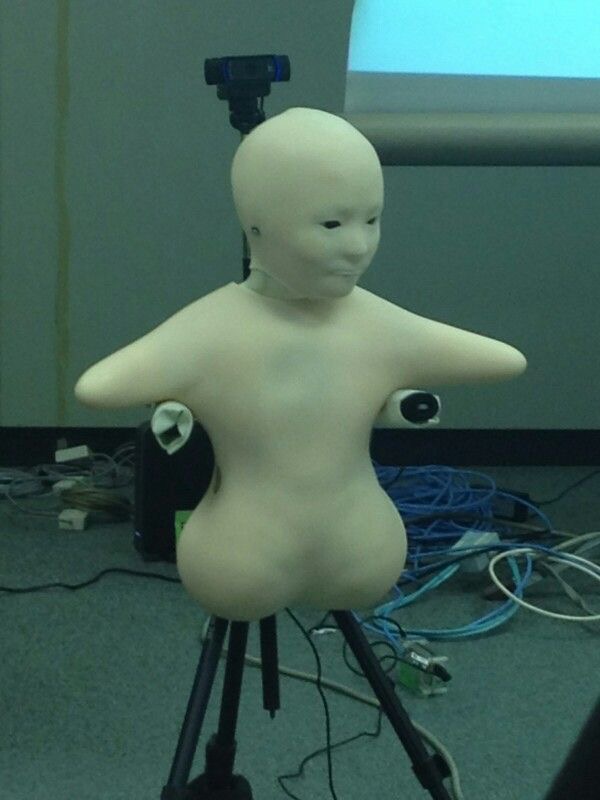
Hiroshi Ishiguro, a roboticist from Japan, developed a remote-controlled telepresence android called the Telenoid R1. However, IEEE Spectrum classified this robot as “an overgrown fetus” since it is far less lifelike.The R1 model, which debuted in August 2010, is constructed of silicone rubber, is around 80 cm tall, weighs 5 kg, and is produced. The Telenoid R1 is primarily used as an audio and movement transmitter, allowing users to send messages far away.
The idea is to give the user the impression that they are speaking with a distant friend. There are some human-like features on it, including a bald head, a doll-like face, and mechanical stubs in place of arms. It has nine actuators, giving the R1 nine degrees of freedom. While their vertical movements are coordinated, each eye can move independently of the other in the horizontal plane. To mimic talking, the mouth can open and close. Yaw, pitch, and rotations for the neck are provided by the three actuators. The final two actuators are used for motion in the arms and then it has a leg-less torso, in a way that really evokes the true sense of what it’s like to be stuck deep in the uncanny valley. Though its developers acknowledged how “eerie” it is at first, they believed humans would ultimately adapt to it.